Orgeln sind zweifellos die größten Musikinstrumente, die der Mensch je erdacht hat, und vermutlich auch die komplexesten mechanischen Konstruktionen, die vor der Industrialisierung realisiert wurden.
Schon eine Orgel mittlerer Größe mit Fotos oder Skizzen vollständig zu erfassen, ist so gut wie unmöglich. Die verschiedenen "Werke" der Orgel, die für sich schon eigenständige Instrumente bilden, sind kompliziert in drei Dimensionen in einander verschachtelt. Welche Detailansicht ein Foto zeigt, wie welche Teile zusammenwirken, ist für jemanden, der nicht selbst in der Orgel war, kaum zu begreifen.
Schon seit einiger Zeit setze ich daher hochauflösende Panoramafotos ein, um Instrumente zu dokumentieren und virtuelle Rundgänge zu erstellen. In diesen Panoramen kann man in kleinste Details hineinzoomen. Fachleute erhalten so wichtige Hinweise zu den verwendeten Materialien und möglichen Schäden. Doch um konkrete Projekte zur Restaurierung oder Umbauten zu planen, müssen zusätzlich Maße genommen werden – eine mühsame und fehleranfällige Arbeit, die oft viele Besuche des Instruments erfordern.
Schon eine Orgel mittlerer Größe mit Fotos oder Skizzen vollständig zu erfassen, ist so gut wie unmöglich. Die verschiedenen "Werke" der Orgel, die für sich schon eigenständige Instrumente bilden, sind kompliziert in drei Dimensionen in einander verschachtelt. Welche Detailansicht ein Foto zeigt, wie welche Teile zusammenwirken, ist für jemanden, der nicht selbst in der Orgel war, kaum zu begreifen.
Schon seit einiger Zeit setze ich daher hochauflösende Panoramafotos ein, um Instrumente zu dokumentieren und virtuelle Rundgänge zu erstellen. In diesen Panoramen kann man in kleinste Details hineinzoomen. Fachleute erhalten so wichtige Hinweise zu den verwendeten Materialien und möglichen Schäden. Doch um konkrete Projekte zur Restaurierung oder Umbauten zu planen, müssen zusätzlich Maße genommen werden – eine mühsame und fehleranfällige Arbeit, die oft viele Besuche des Instruments erfordern.
So entstand die Idee, digitale Zwillinge von Orgeln zu erschaffen, dreidimensionale Modelle, in denen Konstrukteure alle Informationen zum räumlichen Aufbau finden und zugleich alle Details mit hoher fotografischer Qualität dokumentiert sind.
Idealerweise sollten diese Daten so aufbereitet sein, dass sie auch Anwender ohne teure 3D-Software und hochgezüchtete PC-Hardware benutzen können.
Geht das?
3D-Scanner werden von Vermessungs- und Bauingenieuren schon lange eingesetzt. Doch was können solche Daten einem Orgelbauer, Denkmalschützer oder Kunsthistoriker nützen? Lassen sich die Geräte, die normalerweise auf Großbaustellen eingesetzt werden, überhaupt in den verwinkelten Instrumenten benutzen, in denen man sich über viele Ebenen nur über schmale Leitern bewegen kann und nur selten eine Sichtverbindung zwischen verschiedenen Scannerstandorten besteht? Wie lassen sich die verschiedenen Informationen und unterschiedlichen Datenformate mit einander verknüpfen?
Diese Fragen zu klären, erforderte einigen Aufwand und viel Zeit. Das Bundesministerium für Wirtschaft und Energie förderte die Machbarkeitsstudie im Rahmen des "Innovationsprogramms für Geschäftsmodelle und Pionierlösungen" (IGP) als Pilotprojekt zur Digitalisierung im Bereich von Kulturgut und Denkmalschutz.
Idealerweise sollten diese Daten so aufbereitet sein, dass sie auch Anwender ohne teure 3D-Software und hochgezüchtete PC-Hardware benutzen können.
Geht das?
3D-Scanner werden von Vermessungs- und Bauingenieuren schon lange eingesetzt. Doch was können solche Daten einem Orgelbauer, Denkmalschützer oder Kunsthistoriker nützen? Lassen sich die Geräte, die normalerweise auf Großbaustellen eingesetzt werden, überhaupt in den verwinkelten Instrumenten benutzen, in denen man sich über viele Ebenen nur über schmale Leitern bewegen kann und nur selten eine Sichtverbindung zwischen verschiedenen Scannerstandorten besteht? Wie lassen sich die verschiedenen Informationen und unterschiedlichen Datenformate mit einander verknüpfen?
Diese Fragen zu klären, erforderte einigen Aufwand und viel Zeit. Das Bundesministerium für Wirtschaft und Energie förderte die Machbarkeitsstudie im Rahmen des "Innovationsprogramms für Geschäftsmodelle und Pionierlösungen" (IGP) als Pilotprojekt zur Digitalisierung im Bereich von Kulturgut und Denkmalschutz.
Die Orgelanlage im Passauer Dom, die aus insgesamt fünf Orgeln besteht, ist die größte Orgel Europas mit insgesamt knapp 18.000 Pfeifen. Für das 3D-Projekt wurde die Hauptorgel mit 126 Registern ausgewählt, die mit über 16 Metern Höhe auf sechs Ebenen aufgebaut ist. Die Corona-Pandemie erwies sich für das Projekt als Glücksfall, denn normalerweise ist die Orgel fast rund um die Uhr für Proben, Gottesdienste und Konzerte in Betrieb. Nur weil die Lockdowns fast alle Aktivitäten zum Stillstand brachten, konnte ich insgesamt knapp zwei Wochen im Instrument verbringen, um die verschiedenen Methoden zu erproben (siehe "Technik").
Aus 218 Laserscans entstand ein Datensatz von über 8 Milliarden 3D-Koordinaten, die Orgel und das umgebene Kirchgebäude abbilden.
In der Orgel und um sie herum wurden 51 hochauflösende Panoramaaufnahmen erstellt, die in einem virtuellen Rundgang Einblicke in das Instrument ermöglichen, die sonst nur wenigen Orgelbauern möglich sind. Über eine Webplattform gelang die Integration von photorealistischen Panoramen und 3D-Visualisierungen, die nun beliebige Raumansichten und Schnitte durch das komplexe Gebilde ermöglichen. Eine Offenbarung für Orgelkenner und eine wertvolle Planungshilfe für das im Jahre 2020 gestartete große Umbauprojekt, in deren Verlauf die Hauptorgel in den kommenden Jahren ein komplett neues Innenleben erhalten wird.
Aus 218 Laserscans entstand ein Datensatz von über 8 Milliarden 3D-Koordinaten, die Orgel und das umgebene Kirchgebäude abbilden.
In der Orgel und um sie herum wurden 51 hochauflösende Panoramaaufnahmen erstellt, die in einem virtuellen Rundgang Einblicke in das Instrument ermöglichen, die sonst nur wenigen Orgelbauern möglich sind. Über eine Webplattform gelang die Integration von photorealistischen Panoramen und 3D-Visualisierungen, die nun beliebige Raumansichten und Schnitte durch das komplexe Gebilde ermöglichen. Eine Offenbarung für Orgelkenner und eine wertvolle Planungshilfe für das im Jahre 2020 gestartete große Umbauprojekt, in deren Verlauf die Hauptorgel in den kommenden Jahren ein komplett neues Innenleben erhalten wird.
Die Orgel und der Dom wurden mit 51 hochauflösenden Panoramabildern und 218 Laserscans erfasst.
Auf der Panorama-Website lassen sich die 360°-Bilder mit allen Browsern und Mobilgeräten erkunden.
Die 3D-Website mit freier Navigation in der Punktwolke, Scanner-Panoramen und den verknüpften HD-Panoramen erfordert einen unterstützten Desktop-Browser, vorzugsweise Firefox.
Eine gute Internetverbindung und eine etwas leistungsfähigere Grafikkarte erleichtert das Navigieren in den 3D-Daten.
Eingebettete Links in beiden Websites ermöglichen auch den Wechsel zwischen den Sites an einigen korrespondierenden Ansichten.
Die 3D-Website stellt einige wertvolle Tools zur Verfügung, mit denen man z.B. Räume vermessen oder eigene Schnitte erstellen kann.
Der folgende Abschnitt mit Hinweisen zur Bedienung hilft, sich mit diesen Werkzeugen zurechtzufinden.
Auf der Panorama-Website lassen sich die 360°-Bilder mit allen Browsern und Mobilgeräten erkunden.
Die 3D-Website mit freier Navigation in der Punktwolke, Scanner-Panoramen und den verknüpften HD-Panoramen erfordert einen unterstützten Desktop-Browser, vorzugsweise Firefox.
Eine gute Internetverbindung und eine etwas leistungsfähigere Grafikkarte erleichtert das Navigieren in den 3D-Daten.
Eingebettete Links in beiden Websites ermöglichen auch den Wechsel zwischen den Sites an einigen korrespondierenden Ansichten.
Die 3D-Website stellt einige wertvolle Tools zur Verfügung, mit denen man z.B. Räume vermessen oder eigene Schnitte erstellen kann.
Der folgende Abschnitt mit Hinweisen zur Bedienung hilft, sich mit diesen Werkzeugen zurechtzufinden.
Alle in einem Panorama-Standort sichtbaren anderen Panoramen sind durch weiße Kreise markiert. Durch Klicken springt man direkt zum neuen Panorama, das sich in einer voreingestellten Ansicht öffnet.
Die Blickrichtung wird durch Ziehen mit gedrückter Maus (oder per Wischbewegung auf Touchscreens) verändert. Das Ein- und Auszoomen funktioniert per Mausrad oder Zoom-Geste auf Touchscreens.
Die Pfeile links/rechts springen zum vorherigen/nächsten Panorama in der Liste. Dabei bleibt die aktuelle Blickrichtung erhalten (was die räumliche Orientierung erleichtert, aber dazu führen kann, dass man plötzlich gegen eine Wand guckt und das Panorama erst drehen muss, um etwas Interessantes zu sehen).
Die Blickrichtung wird durch Ziehen mit gedrückter Maus (oder per Wischbewegung auf Touchscreens) verändert. Das Ein- und Auszoomen funktioniert per Mausrad oder Zoom-Geste auf Touchscreens.
Die Pfeile links/rechts springen zum vorherigen/nächsten Panorama in der Liste. Dabei bleibt die aktuelle Blickrichtung erhalten (was die räumliche Orientierung erleichtert, aber dazu führen kann, dass man plötzlich gegen eine Wand guckt und das Panorama erst drehen muss, um etwas Interessantes zu sehen).
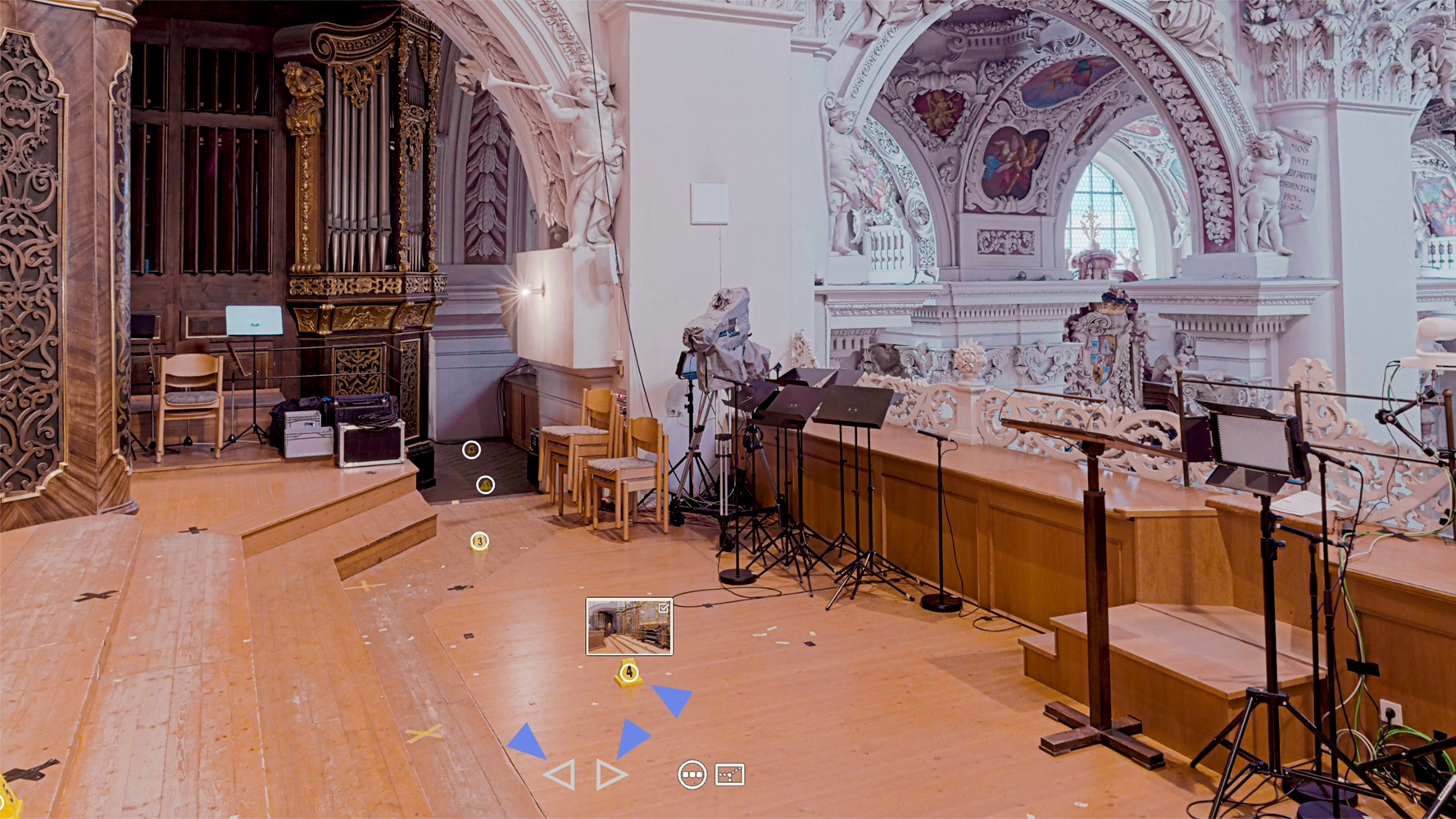
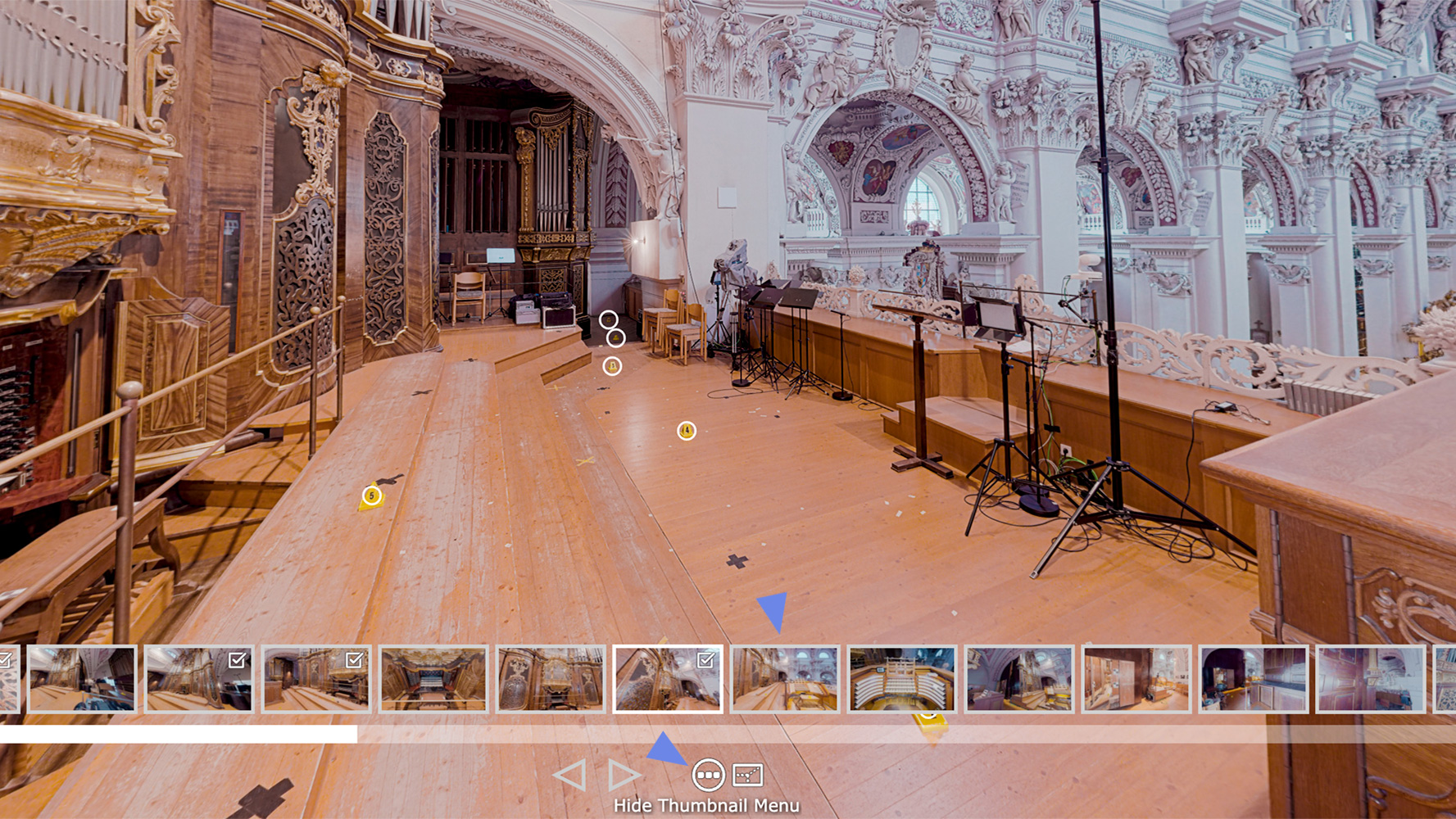
Ein Klick auf das Galerie-Icon (…) öffnet eine Leiste von Miniaturen aller Panoramen, die dort direkt angeklickt werden können. Bereits besuchte Panoramen erhalten einen Haken.
In einigen Panoramen ist ein 3D-Icon platziert.
Ein Klick darauf öffnet in einem separaten Fenster die 3D-Website an einem ähnlichen Standort.
Die 3D-Site ist auf mobilen Endgeräten nicht verfügbar und ist auf Desktop-Systemen nur mit bestimmten Browsern kompatibel.
Je nach voreingestelltem Standardbrowser erscheint möglicherweise eine Meldung, die einen bestimmten Browser verlangt.
Ein Klick darauf öffnet in einem separaten Fenster die 3D-Website an einem ähnlichen Standort.
Die 3D-Site ist auf mobilen Endgeräten nicht verfügbar und ist auf Desktop-Systemen nur mit bestimmten Browsern kompatibel.
Je nach voreingestelltem Standardbrowser erscheint möglicherweise eine Meldung, die einen bestimmten Browser verlangt.

Auf der Website sind zwei Arten von stationären Panoramen verknüpft:
Die 218 Laserscanner-Standorte sind mit roten Scanner-Icons markiert,
die 51 hochauflösenden Panorama-Fotos mit grünen Panorama-Icons.
In Scanner-Panoramen funktionieren die Mess-Werkzeuge und die Anzeige von Raum-Koordinaten mit Meter-Angaben.
Die Panorama-Fotos haben eine wesentlich höhere Bildqualität, enthalten aber keine 3D-Informationen, daher können hier keine Messwerkzeuge verwendet werden.
Die 218 Laserscanner-Standorte sind mit roten Scanner-Icons markiert,
die 51 hochauflösenden Panorama-Fotos mit grünen Panorama-Icons.
In Scanner-Panoramen funktionieren die Mess-Werkzeuge und die Anzeige von Raum-Koordinaten mit Meter-Angaben.
Die Panorama-Fotos haben eine wesentlich höhere Bildqualität, enthalten aber keine 3D-Informationen, daher können hier keine Messwerkzeuge verwendet werden.
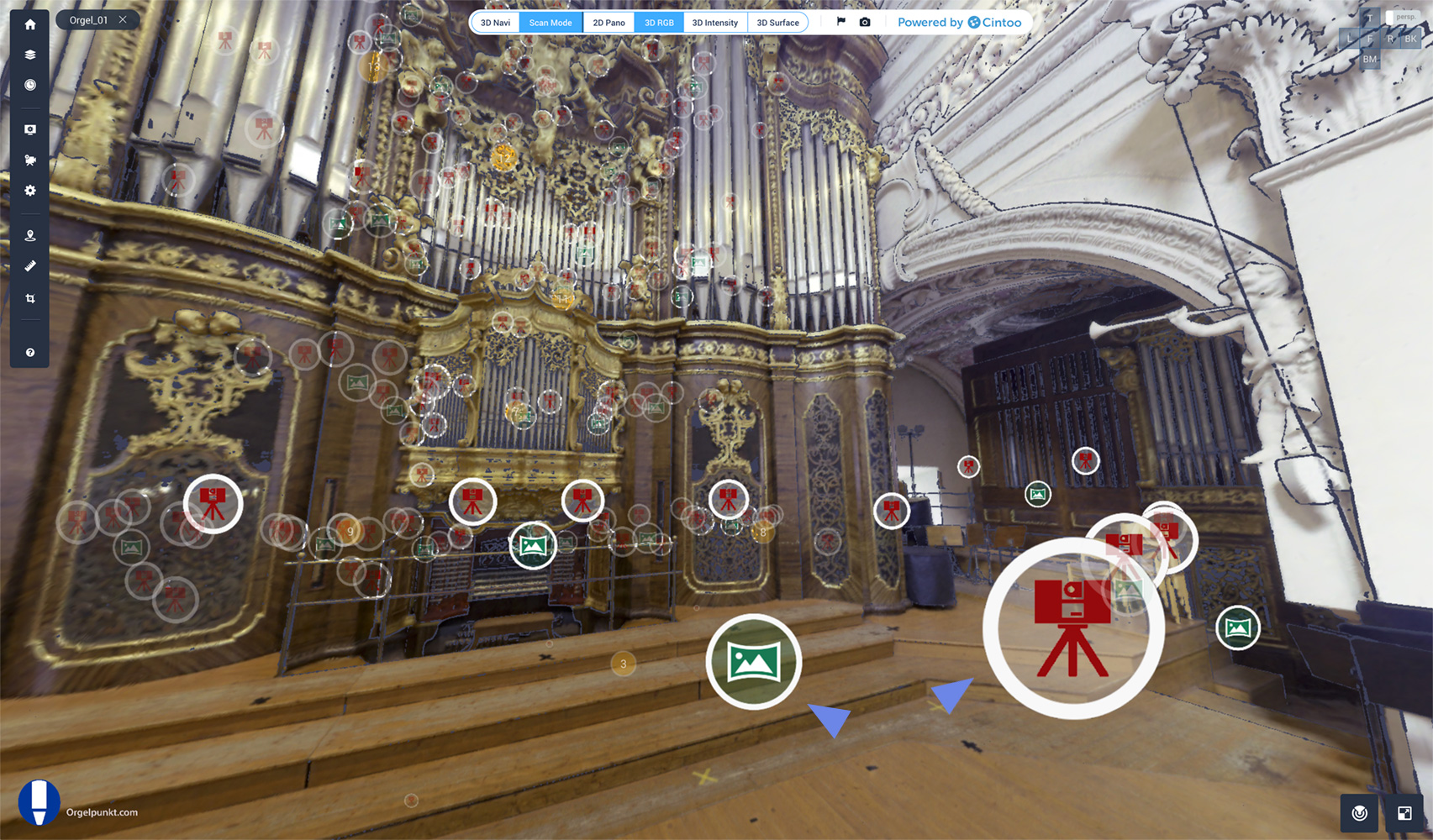
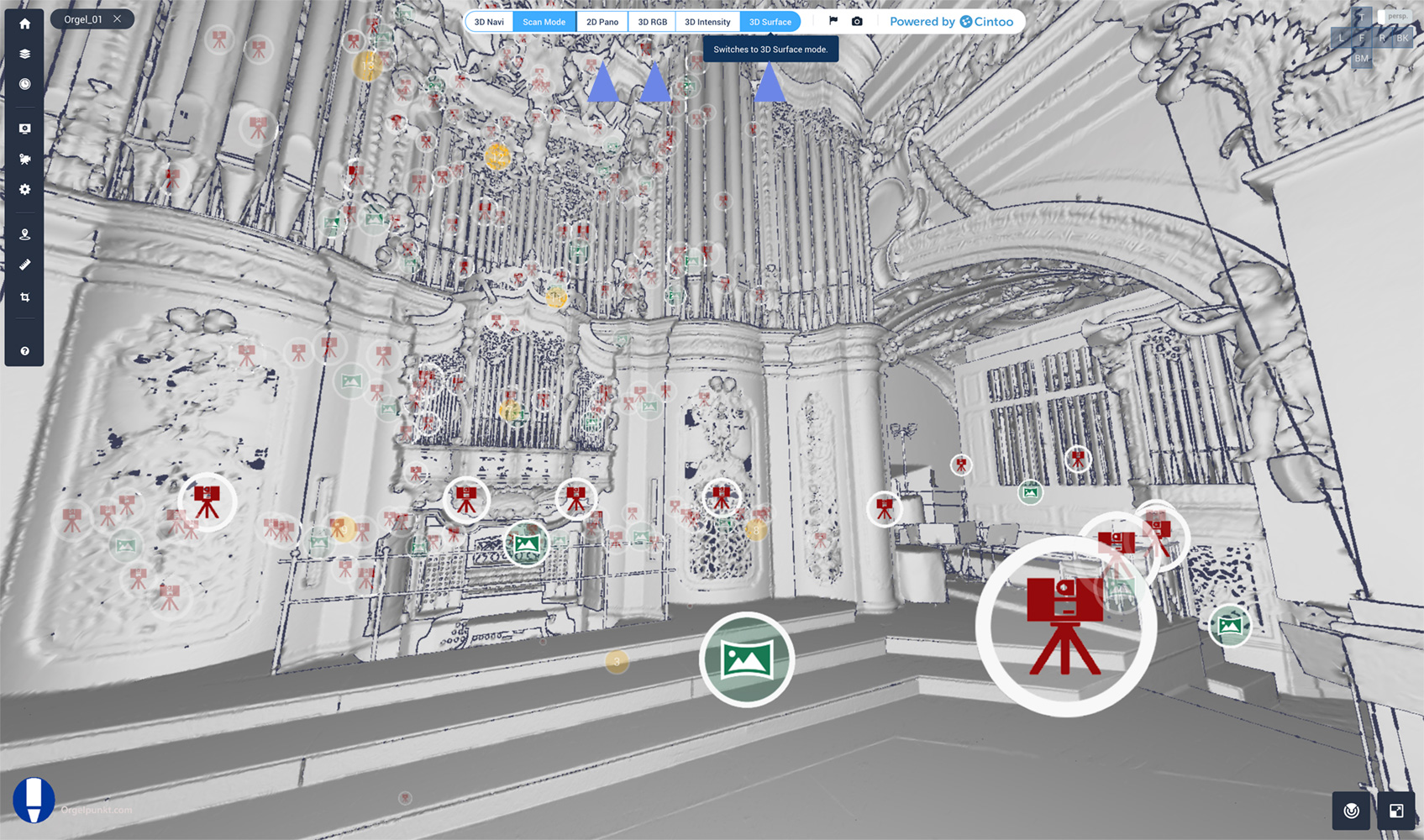
Die Scannerbilder können auf verschiedene Weise dargestellt werden.
Die "2D Pano"-Darstellung ist fotorealistisch, die "3D RGB"-Darstellung zeigt kolorierte Oberflächen, Die "3D Surface"-Ansicht zeigt eine monochrome Flächen-Ansicht mit hervorgehobenen Kanten.
Die "2D Pano"-Darstellung ist fotorealistisch, die "3D RGB"-Darstellung zeigt kolorierte Oberflächen, Die "3D Surface"-Ansicht zeigt eine monochrome Flächen-Ansicht mit hervorgehobenen Kanten.
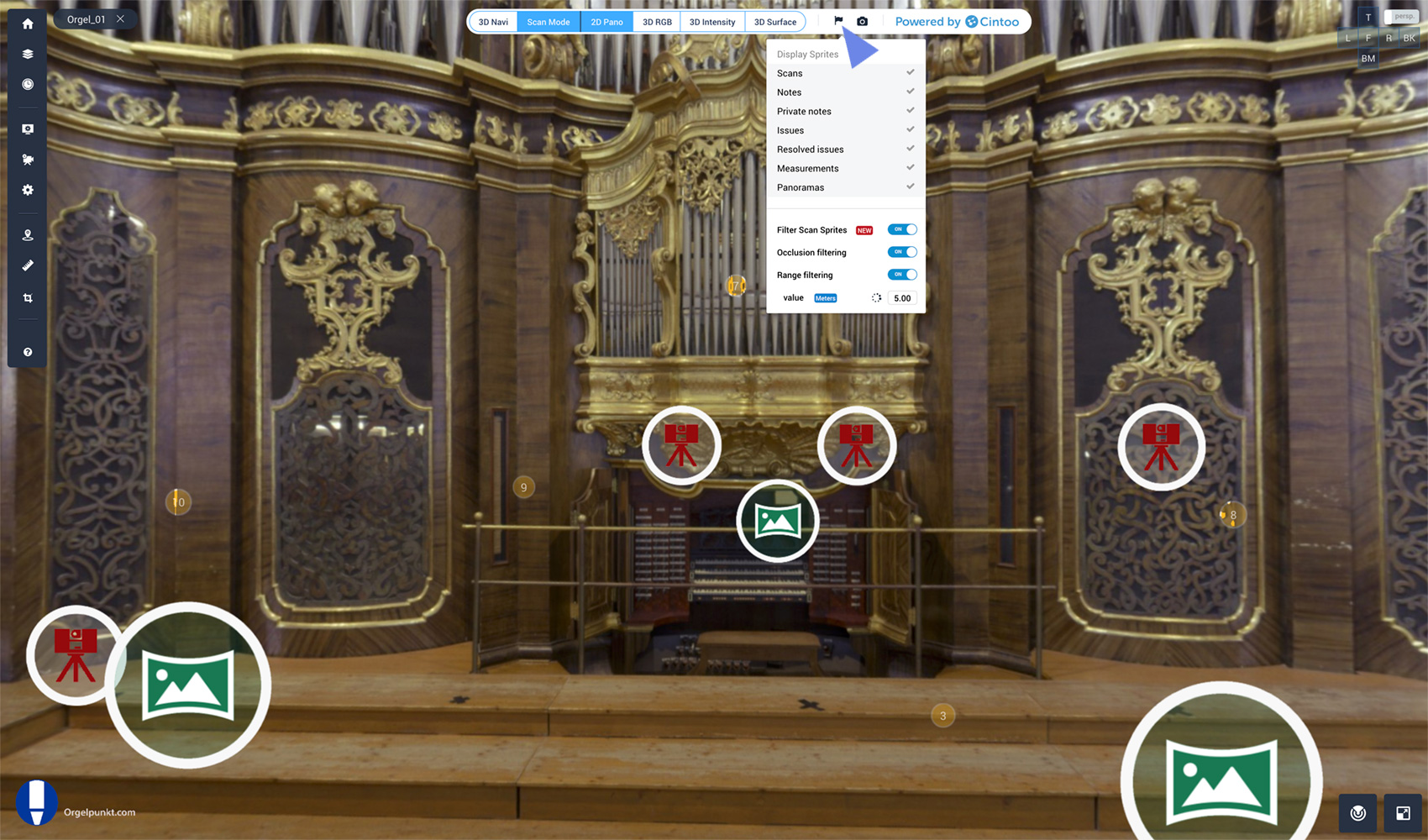
Die Menge an diversen Symbolen auf dem Bildschirm kann die Ansicht in der engen Orgel sehr unübersichtlich machen.
Diese "Sprites" lassen sich nach Bedarf ausschalten oder filtern.
Das Fähnchen-Icon öffnet eine Liste, in der auszuwählen ist, welche Art von Hinweisen angezeigt werden sollen.
Hilfreich ist die Option "occlusion filtering", die Symbole ausblendet, die gerade von Objekten im Bild verdeckt sind. Mehr Übersicht schafft auch das "Range Filtering", das Symbole ausblendet, die weiter als die eingestellte Distanz entfernt sind.
Das Filtern funktioniert allerdings nur in Scanner-Ansichten, nicht in Panoramabildern, die keine 3D-Information enthalten.
Diese "Sprites" lassen sich nach Bedarf ausschalten oder filtern.
Das Fähnchen-Icon öffnet eine Liste, in der auszuwählen ist, welche Art von Hinweisen angezeigt werden sollen.
Hilfreich ist die Option "occlusion filtering", die Symbole ausblendet, die gerade von Objekten im Bild verdeckt sind. Mehr Übersicht schafft auch das "Range Filtering", das Symbole ausblendet, die weiter als die eingestellte Distanz entfernt sind.
Das Filtern funktioniert allerdings nur in Scanner-Ansichten, nicht in Panoramabildern, die keine 3D-Information enthalten.
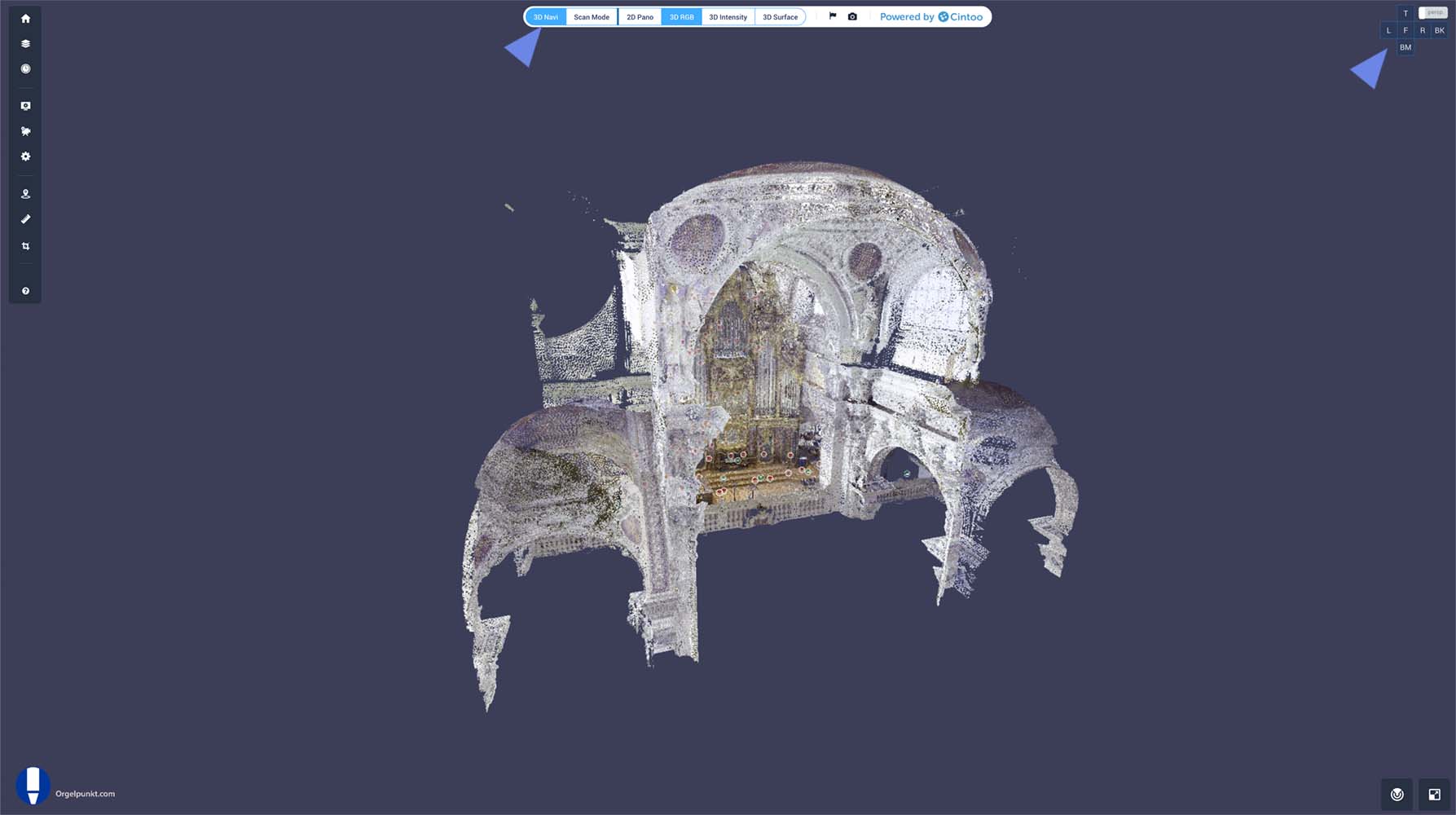
Während der Scanner-Modus die Umgebung jeweils aus der Aufnahmeperspektive eines Scanner- oder Kamerastandpunkts zeigt, kann man sich frei im Raum bewegen, wenn man auf "3D-Navi" in der oberen Werkzeugleiste umschaltet.
Jetzt wechselt die Darstellung zur "Punktwolke", die sich aus allen Messpunkten zusammensetzt, die in den 218 Laserscans aufgenommen wurden. Auch wenn das Projekt insgesamt rund 8 Milliarden Punkte enthält, ist die Punktwolke natürlich nicht so detailreich wie ein Foto. Dafür kann man aus jeder Perspektive auf die Objekte blicken. Zwangsläufig gibt es Stellen, die von keinem Laserstrahl erfasst wurden, doch die vielen überlappenden Scans ergeben ein sehr engmaschiges Netz.
Oben rechts im Bild sind Schaltflächen, die den Betrachter in eine der Standardperspektiven im Koordinatensystem bringen (T: top, oben, L: left, links, etc.). Der Schalter "persp./ortho" schaltet von einer Kamera-ähnlichen perspektivisch verzerrten Ansicht zu einer Zeichnungs-ähnlichen orthografischen Ansicht um.
Mit dem Mausrad zoomt man in das Bild, mit gedrückter linker Maustaste lässt sich der Raum um den Klickpunkt drehen. Mit gedrückter rechter Maustaste verschiebt man das Blickfenster in der Bildebene.
Durch Anklicken eines Scanner-Symbols in der Szene oder eine Panorama-Bilds verlässt man den 3D-Modus wieder und springt an den jeweiligen Standort.
Die 3D-Navigation erfordert eine gute Internetverbindung und eine etwas leistungsstärkere Grafik-Hardware, damit sich das Bild beim Ändern der Perspektive flüssig mitbewegt.
Jetzt wechselt die Darstellung zur "Punktwolke", die sich aus allen Messpunkten zusammensetzt, die in den 218 Laserscans aufgenommen wurden. Auch wenn das Projekt insgesamt rund 8 Milliarden Punkte enthält, ist die Punktwolke natürlich nicht so detailreich wie ein Foto. Dafür kann man aus jeder Perspektive auf die Objekte blicken. Zwangsläufig gibt es Stellen, die von keinem Laserstrahl erfasst wurden, doch die vielen überlappenden Scans ergeben ein sehr engmaschiges Netz.
Oben rechts im Bild sind Schaltflächen, die den Betrachter in eine der Standardperspektiven im Koordinatensystem bringen (T: top, oben, L: left, links, etc.). Der Schalter "persp./ortho" schaltet von einer Kamera-ähnlichen perspektivisch verzerrten Ansicht zu einer Zeichnungs-ähnlichen orthografischen Ansicht um.
Mit dem Mausrad zoomt man in das Bild, mit gedrückter linker Maustaste lässt sich der Raum um den Klickpunkt drehen. Mit gedrückter rechter Maustaste verschiebt man das Blickfenster in der Bildebene.
Durch Anklicken eines Scanner-Symbols in der Szene oder eine Panorama-Bilds verlässt man den 3D-Modus wieder und springt an den jeweiligen Standort.
Die 3D-Navigation erfordert eine gute Internetverbindung und eine etwas leistungsstärkere Grafik-Hardware, damit sich das Bild beim Ändern der Perspektive flüssig mitbewegt.
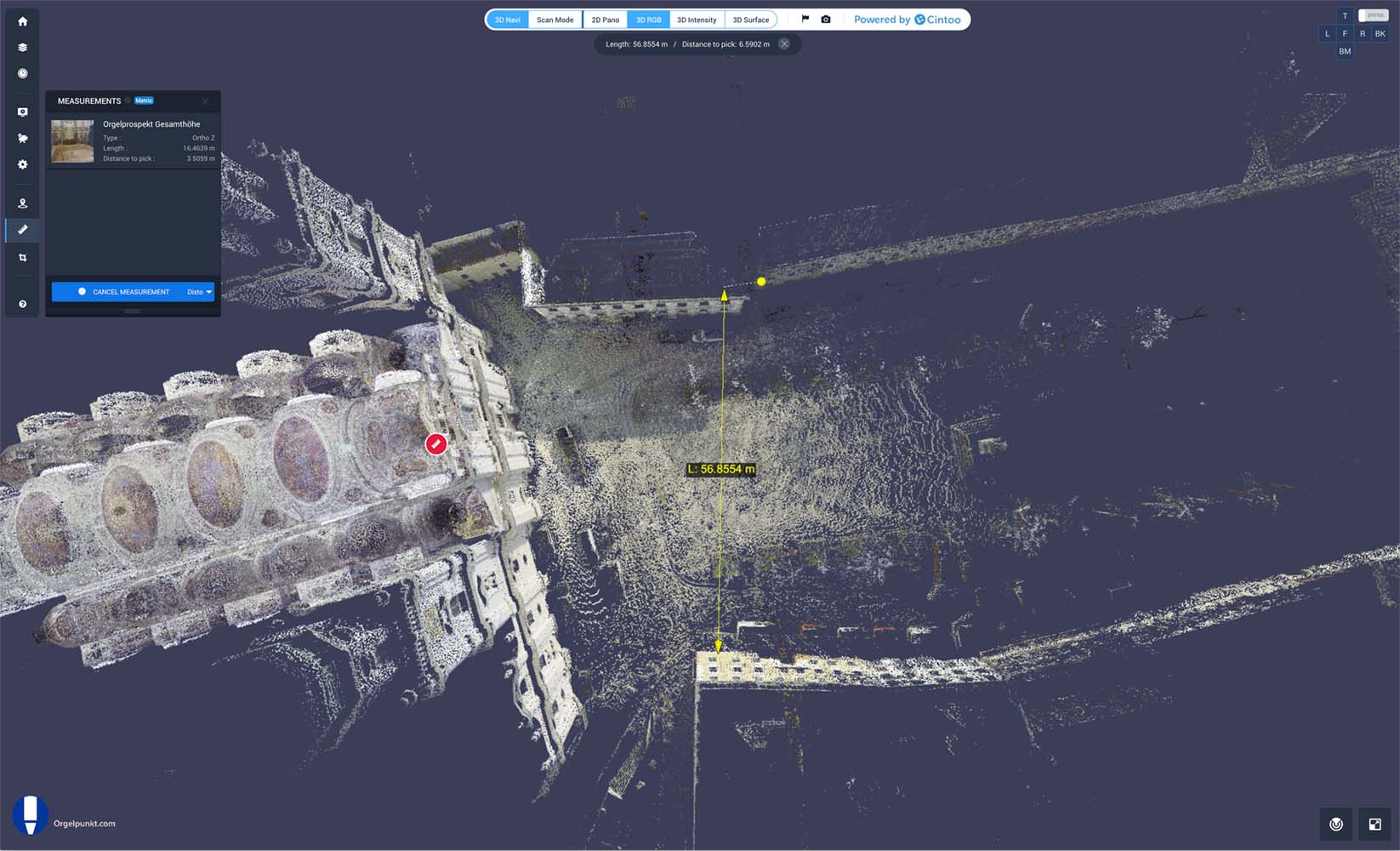
In Scanner-Bildern (nicht in Panorama-Fotos) und in der Punktwolke, können virtuelle Messungen zwischen beliebigen Punkten durchgeführt werden.
Ein Klick auf das Linal-Symbol in der linken Werkzeugleiste öffnet das Messfenster.
Dort wird mit "add measurement" ein neuer Messvorgang gestartet.
Ein Klick auf das Linal-Symbol in der linken Werkzeugleiste öffnet das Messfenster.
Dort wird mit "add measurement" ein neuer Messvorgang gestartet.
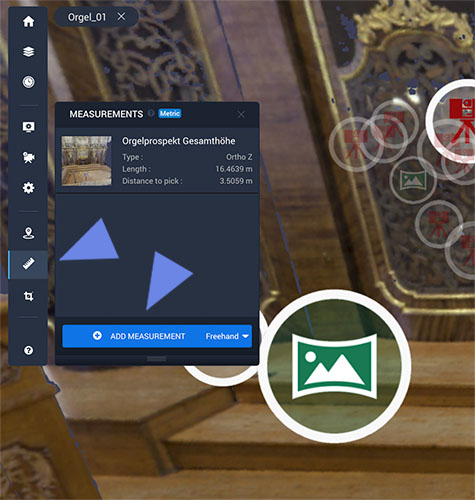
Anschließend klicken Sie nacheinander zwei Punkte in der Ansicht an.
Das Messwerkzeug zeigt die Distanz zwischen den Punkten an.
Hinweis: Als Besucher dieser Website steht Ihnen die Funktion zum Abspeichern von Messungen nicht zur Verfügung. Mit "cancel measurement" beenden Sie einen Messvorgang und können einen neuen durch "add measurement" starten.
Das Messwerkzeug zeigt die Distanz zwischen den Punkten an.
Hinweis: Als Besucher dieser Website steht Ihnen die Funktion zum Abspeichern von Messungen nicht zur Verfügung. Mit "cancel measurement" beenden Sie einen Messvorgang und können einen neuen durch "add measurement" starten.
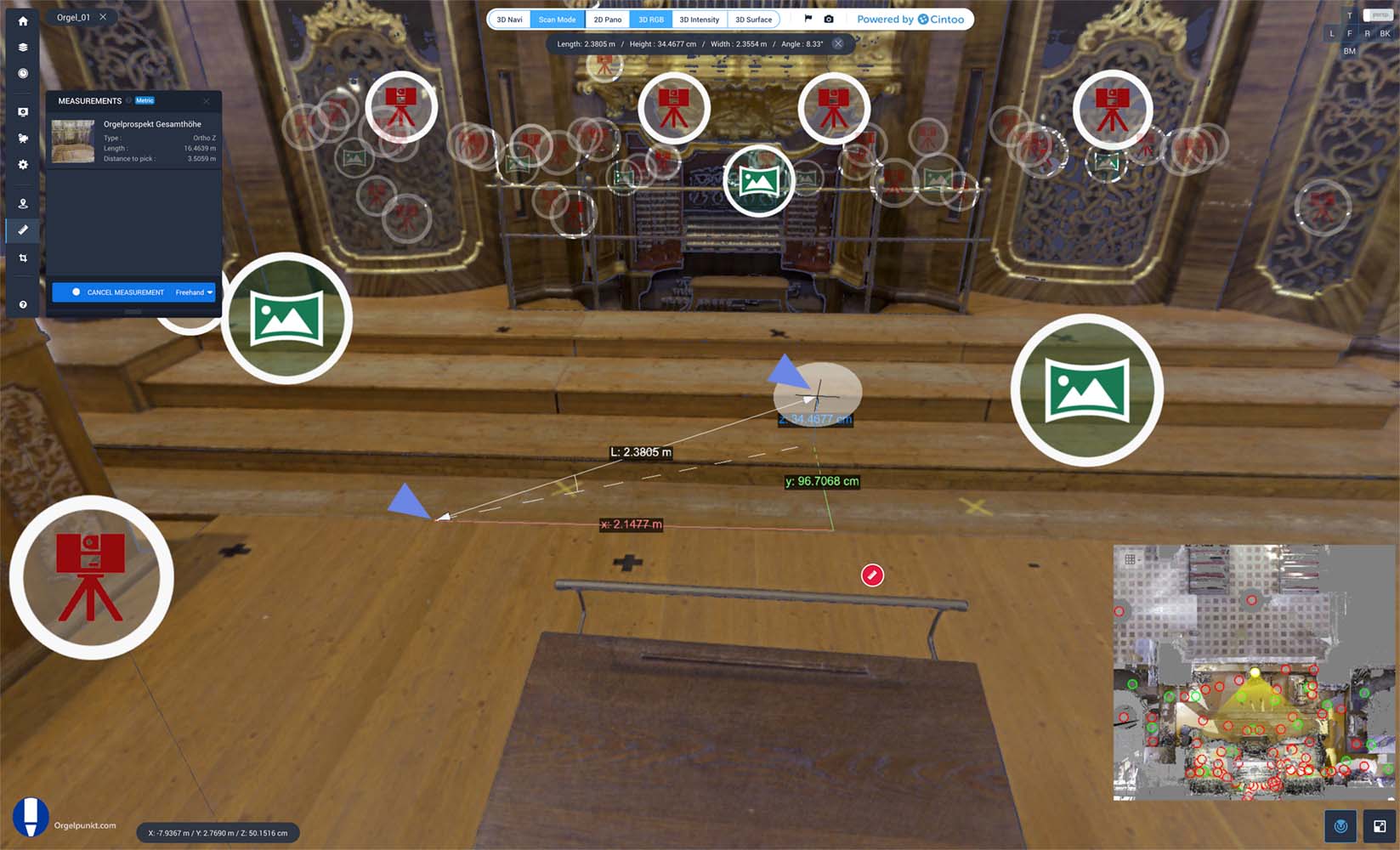
Es ist sehr schwierig, beim Anklicken von zwei Punkten im 3D-Raum tatsächlich die gesuchte Breite oder Höhe zu bestimmen. Ist einer der Punkte in einer Dimension verrutscht, so ist das je nach Blickrichtung kaum zu erkennen, die Strecke zwischen den Punkten ergibt aber als Diagonale eines Dreiecks ungewollte Ergebnisse.
Das Messwerkzeug hat die Option, gezielt den Abstand der Referenzpunkte entlang einer Koordinate anzuzeigen.
Zur Wahl des Messmodus klickt man rechts auf das Drop-Down-Menü der Mess-Schaltfläche und wählt aus den "ortho"-Moden die gewünschte Raumrichtung für die Distanzmessung.
Das Koordinatensystem ist so orientiert, dass die X-Richtung parallel zur Orgelfront verläuft, die Y-Richtung von der Orgel zum Altar zeigt. Die Z-Koordinate gibt die Höhe über dem Emporenboden an. "Ortho Z" zeigt so immer streng vertikale Abstände an.
Das Messwerkzeug hat die Option, gezielt den Abstand der Referenzpunkte entlang einer Koordinate anzuzeigen.
Zur Wahl des Messmodus klickt man rechts auf das Drop-Down-Menü der Mess-Schaltfläche und wählt aus den "ortho"-Moden die gewünschte Raumrichtung für die Distanzmessung.
Das Koordinatensystem ist so orientiert, dass die X-Richtung parallel zur Orgelfront verläuft, die Y-Richtung von der Orgel zum Altar zeigt. Die Z-Koordinate gibt die Höhe über dem Emporenboden an. "Ortho Z" zeigt so immer streng vertikale Abstände an.
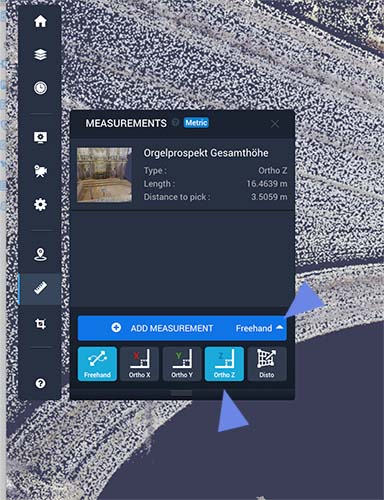
Im "Disto"-Modus ermittelt das Messwerkzeug die Distanz zwischen zwei Ebenen, auf denen sich die Referenzpunkte befinden.
Das Schnitt-Werkzeug bietet enorme Möglichkeiten, sich in der riesigen 3D-Punktwolke zurechtzufinden.
Ein Klick auf das Schnittwerkzeug in der linken Werkzeugleiste öffnet die Schnittliste (crop list) und die Regler für die Schnitt-Parameter.
Die Schnitt-Regler erlauben durch Ziehen an den Begrenzungspunkten, in jeder Raumrichtung Grenzen zu setzen, an denen das dargestellte Volumen abgeschnitten wird.
In der 3D-Navi-Ansicht kann man das herausgeschnittene Volumen aus allen Richtungen wie eine Puppenstube betrachten.
Ein Klick auf das Schnittwerkzeug in der linken Werkzeugleiste öffnet die Schnittliste (crop list) und die Regler für die Schnitt-Parameter.
Die Schnitt-Regler erlauben durch Ziehen an den Begrenzungspunkten, in jeder Raumrichtung Grenzen zu setzen, an denen das dargestellte Volumen abgeschnitten wird.
In der 3D-Navi-Ansicht kann man das herausgeschnittene Volumen aus allen Richtungen wie eine Puppenstube betrachten.
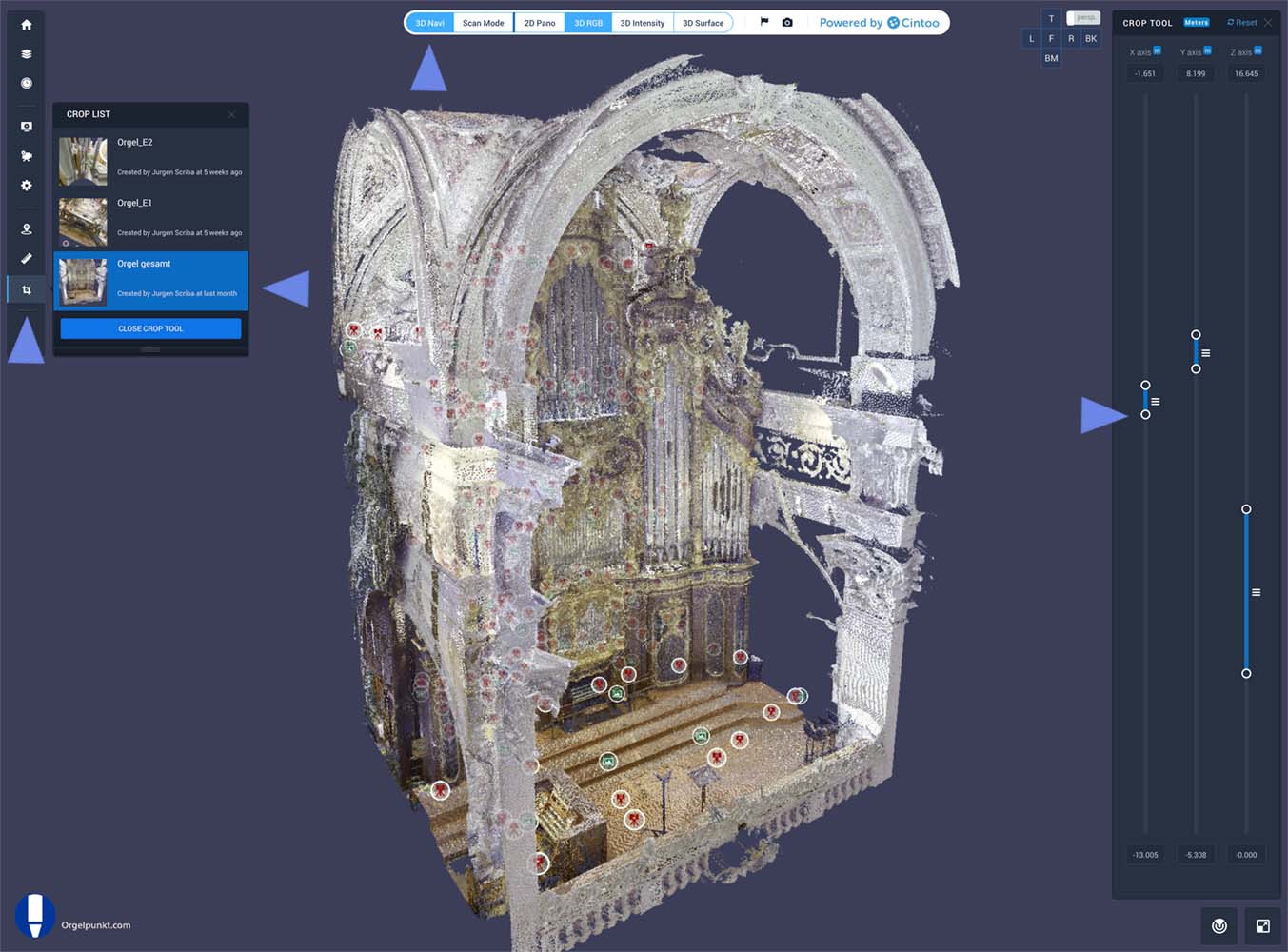
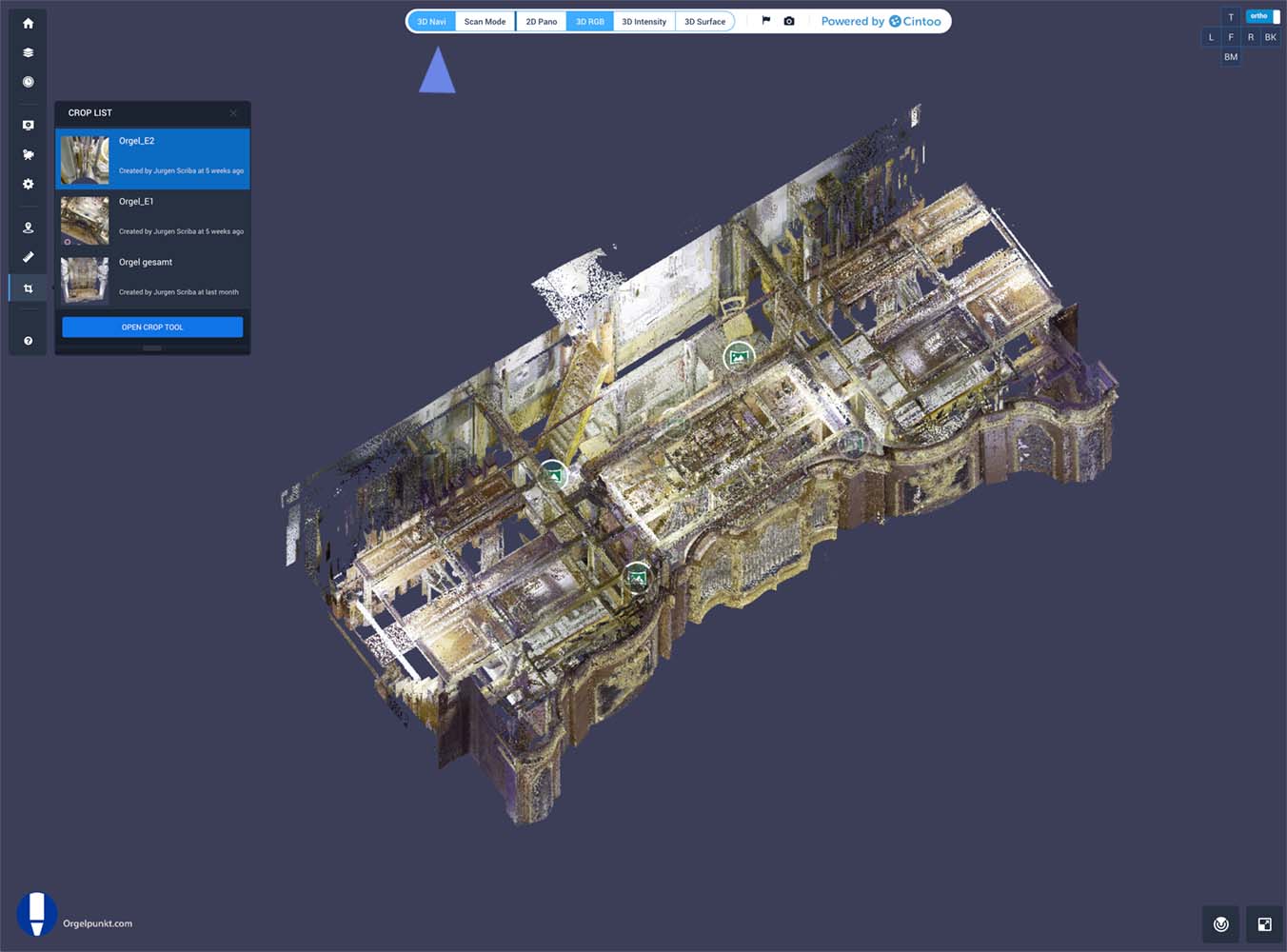
Die Schnittliste enthält einige Horizontal- und Vertikalschnitte, mit denen ich einige bauliche Einheiten der Orgel herausgehoben habe.
Die verschiedenen Ebenen E1-E6 der Orgel sind so bereits als Raumscheiben zu betrachten.
Die verschiedenen Ebenen E1-E6 der Orgel sind so bereits als Raumscheiben zu betrachten.

Photogrammetrie
Auch mit normalen Fotos ist es möglich, einen Raum dreidimensional zu vermessen.
Wenn genügend viele Bilder von unterschiedlichen Standorten zur Verfügung stehen, kann leistungsfähige Software identische Punkte in verschiedenen Fotos identifizieren, die jeweiligen Kamerastandpunkte in der Szene ermitteln und aus den verschiedenen Blickwinkeln zu jedem Pixel des Bildes eine Koordinate berechnen.
In der Auswertung von Drohnenbildern und in der Architektur ist das Verfahren etabliert. Auch in der Archäologie gilt es als verlässliche Methode, um gleichzeitig fotorealistische Abbildungen und 3D-Daten zu erhalten. Daher lag es nahe, auch bei diesem Projekt Photogrammetrie zu erproben.
Mehrere tausend Einzelbilder wurden fotografiert, wie auch Stereo-Bildpaare mit speziellen Kamera-Aufbauten.
Doch im Innern der Orgel versagte der Ansatz. Photogrammetrie kann ihre Vorteile nur ausspielen, wenn die Algorithmen Oberflächen rekonstruieren, auf die dann die hochauflösende Bildinformation als "Textur" abgebildet wird. In dem riesigen Instrument mit seiner filigranen Mechanik im Vorder- und Hintergrund jedes Bildes scheitert jedoch der Versuch, mit einer begrenzten Anzahl von Elementen Flächen zu rekonstruieren und den Bildstrukturen zuzuordnen.
Wenn die getesteten Programme nach vielen Stunden Rechenzeit nicht einfach abstürzen, liefern Sie künstlerisch interessante Ergebnisse, die leider wenig praktischen Nutzen haben.
Auch mit normalen Fotos ist es möglich, einen Raum dreidimensional zu vermessen.
Wenn genügend viele Bilder von unterschiedlichen Standorten zur Verfügung stehen, kann leistungsfähige Software identische Punkte in verschiedenen Fotos identifizieren, die jeweiligen Kamerastandpunkte in der Szene ermitteln und aus den verschiedenen Blickwinkeln zu jedem Pixel des Bildes eine Koordinate berechnen.
In der Auswertung von Drohnenbildern und in der Architektur ist das Verfahren etabliert. Auch in der Archäologie gilt es als verlässliche Methode, um gleichzeitig fotorealistische Abbildungen und 3D-Daten zu erhalten. Daher lag es nahe, auch bei diesem Projekt Photogrammetrie zu erproben.
Mehrere tausend Einzelbilder wurden fotografiert, wie auch Stereo-Bildpaare mit speziellen Kamera-Aufbauten.
Doch im Innern der Orgel versagte der Ansatz. Photogrammetrie kann ihre Vorteile nur ausspielen, wenn die Algorithmen Oberflächen rekonstruieren, auf die dann die hochauflösende Bildinformation als "Textur" abgebildet wird. In dem riesigen Instrument mit seiner filigranen Mechanik im Vorder- und Hintergrund jedes Bildes scheitert jedoch der Versuch, mit einer begrenzten Anzahl von Elementen Flächen zu rekonstruieren und den Bildstrukturen zuzuordnen.
Wenn die getesteten Programme nach vielen Stunden Rechenzeit nicht einfach abstürzen, liefern Sie künstlerisch interessante Ergebnisse, die leider wenig praktischen Nutzen haben.
Mobile Scanner
Diese Scanner arbeiten nicht von festen Standorten aus sondern werden frei im Raum bewegt. Sie funktionieren entweder ähnlich wie stationäre Laserscanner mit reflektierten Laserpulsen, analysieren vorhandenes Licht mit mehreren Kameras oder beleuchten die Szene mit "strukturiertem Licht", dessen Muster die geometrische Form der beleuchteten Oberfläche entschlüsselt.
Das Messprinzip kann gegenüber vielen einzelnen Scans enorm Zeit sparen. Schon sind erste Smartphones auf dem Markt, die neben Kameras auch einen miniaturisierten Scanner enthalten, mit dem sich zum Beispiel virtuelle Abbilder von Möbeln erfassen lassen oder Grundrisse von Räumen.
Doch für komplexe Anwendungen wie in diesem Projekt ist die mobile Scan-Technik noch nicht reif. Auch Top-Geräte zum Preis eines Kleinwagens sind hier überfordert.
Wenn sie für große Räume geeignet sind, erreichen sie mit Messungenauigkeiten im Bereich von einigen Zentimetern nicht die nötige Präzision, um ein brauchbares Modell der Orgel und ihres Innenlebens zu erfassen. Hochgenaue Scanner wiederum, die auch feinste Details von Oberflächen erfassen, können nur kleine Raumvolumina verarbeiten. Damit beispielsweise ein Abbild des Spieltischs zu erzeugen, nimmt bereits einen vollen Tag in Anspruch.
Beim Test verschiedener Sensoren zeigt sich zudem, dass die Materialien von Orgelbau und Kunsthandwerk die Messmethoden an ihre Grenzen bringen. So verlieren die Systeme ihre Orientierung, wenn dunkel gebeiztes Holz das Licht verschluckt, und poliertes Metall irreführende Spiegelungen erzeugt.
Diese Scanner arbeiten nicht von festen Standorten aus sondern werden frei im Raum bewegt. Sie funktionieren entweder ähnlich wie stationäre Laserscanner mit reflektierten Laserpulsen, analysieren vorhandenes Licht mit mehreren Kameras oder beleuchten die Szene mit "strukturiertem Licht", dessen Muster die geometrische Form der beleuchteten Oberfläche entschlüsselt.
Das Messprinzip kann gegenüber vielen einzelnen Scans enorm Zeit sparen. Schon sind erste Smartphones auf dem Markt, die neben Kameras auch einen miniaturisierten Scanner enthalten, mit dem sich zum Beispiel virtuelle Abbilder von Möbeln erfassen lassen oder Grundrisse von Räumen.
Doch für komplexe Anwendungen wie in diesem Projekt ist die mobile Scan-Technik noch nicht reif. Auch Top-Geräte zum Preis eines Kleinwagens sind hier überfordert.
Wenn sie für große Räume geeignet sind, erreichen sie mit Messungenauigkeiten im Bereich von einigen Zentimetern nicht die nötige Präzision, um ein brauchbares Modell der Orgel und ihres Innenlebens zu erfassen. Hochgenaue Scanner wiederum, die auch feinste Details von Oberflächen erfassen, können nur kleine Raumvolumina verarbeiten. Damit beispielsweise ein Abbild des Spieltischs zu erzeugen, nimmt bereits einen vollen Tag in Anspruch.
Beim Test verschiedener Sensoren zeigt sich zudem, dass die Materialien von Orgelbau und Kunsthandwerk die Messmethoden an ihre Grenzen bringen. So verlieren die Systeme ihre Orientierung, wenn dunkel gebeiztes Holz das Licht verschluckt, und poliertes Metall irreführende Spiegelungen erzeugt.